Solution
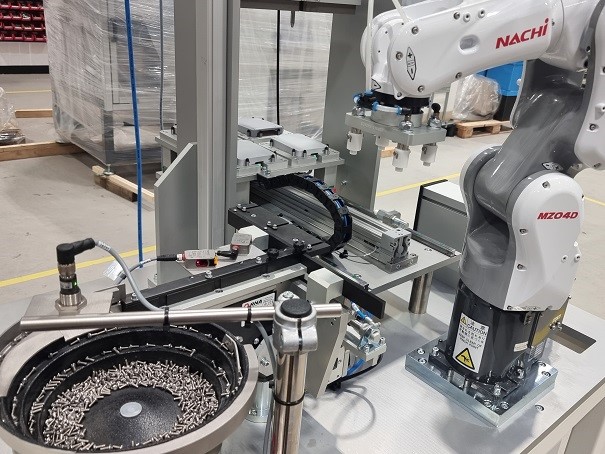
 The solution chosen was a vision guided robotic system equipped with an RNA step feeder, a bulk storage hopper and a 6 axis robot.
The solution chosen was a vision guided robotic system equipped with an RNA step feeder, a bulk storage hopper and a 6 axis robot.
The spoons are automatically fed from the hopper, into the step feeder and then on to a conveyor belt. A brush positioned above the out feed conveyor separates the spoons under a camera system. The image processing software pinpoints the exact location of the spoons and sends the information to the robot. The robot utilizes conveyor tracking software IE the components can be picked without stopping the conveyor belt. In order for the assembly to work correctly the spoons need to be fed with the oval side facing down. Components lying on the wrong side are therefore automatically recycled into the step feeder via camera recognition.
The robot is fitted with a special gripping unit which picks the spoon and places it into the waiting cap positioned on the existing production line.
The vision guided robotic system replaced manual handling by operators, and was designed to supply assembly machines, sorting equipment and other machinery that require short cycle times with multiple component handling.
As a standard in the RNA range delivery is also short thus reducing lead times and improving payback periods on the investment. RNA can offer alternative vision guided robotic systems, each of which is developed to match almost any specifications as an off the shelf package.
Another main advantage of the system is the simplicity to teach in new components. To teach the system a new component takes just a few minutes. The teach-in is menu guided from windows PC software and requires no prerequisites. The vision guided robotic system is robust, compact and prepared for 4 or 6-axis robots, Scara robots and suspended picker robots, offering new opportunities to automate the feeding of components.