Solution:
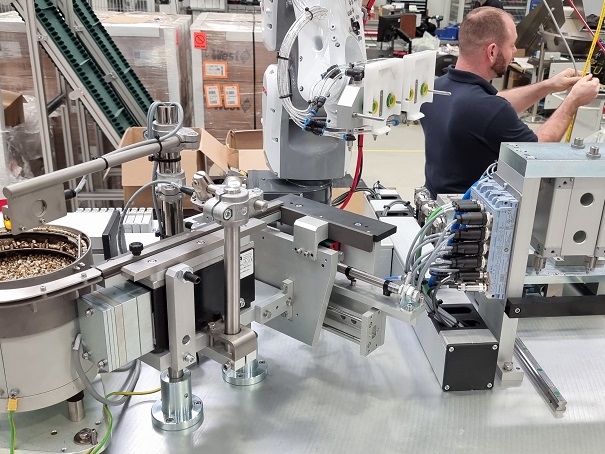
The system includes a bowl feeder, a 6 axis handling robot, hand over station and parts jig.
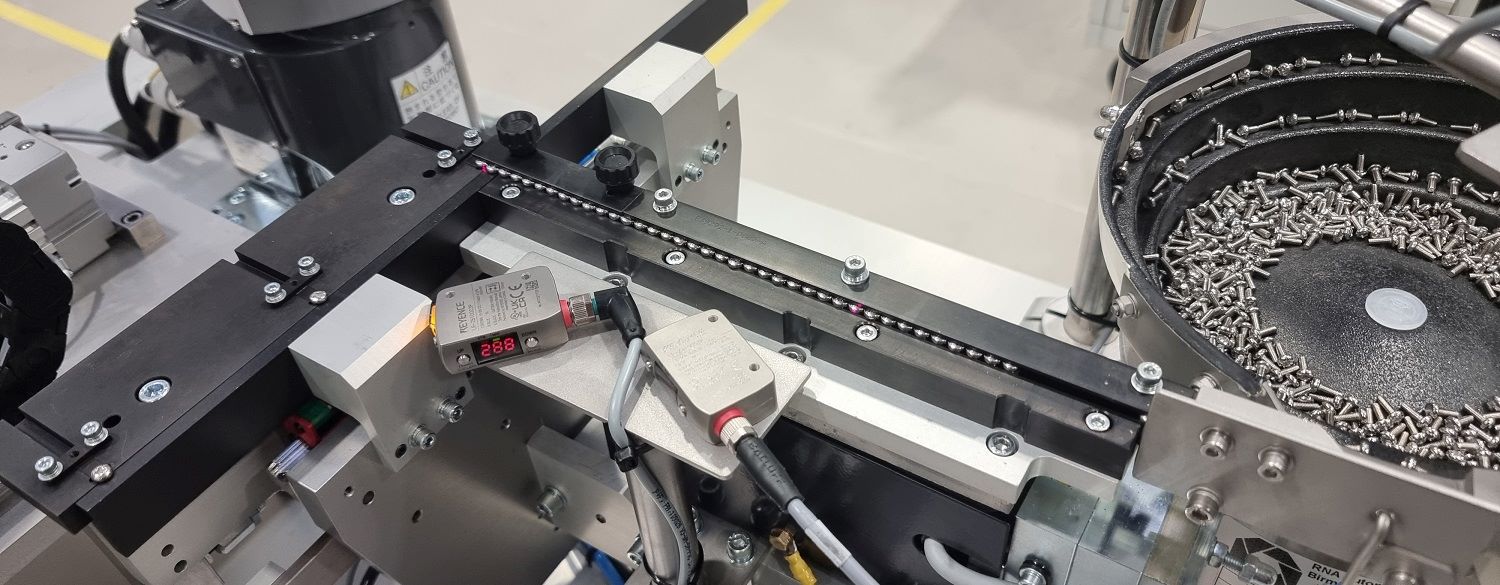
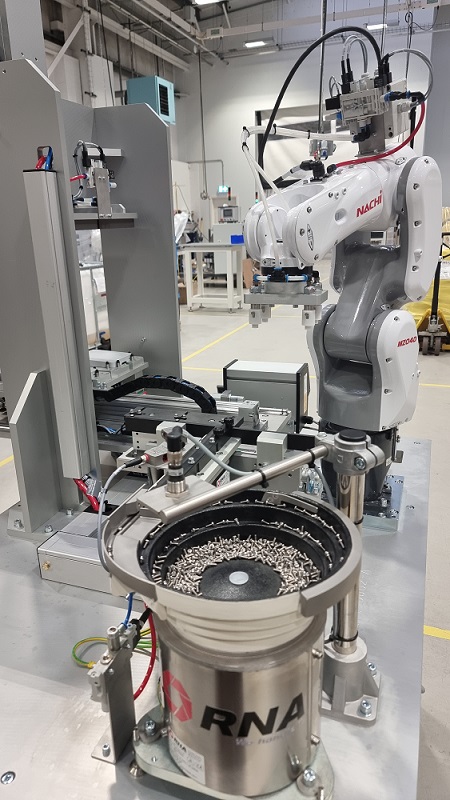
Screw Bowl Feed System
M3 x 8 screws are fed from a vibratory bowl feeder and along a vibratory linear feeder into a pneumatically actuated escapement which presents 2 screws at a time from alternating positions. A Nachi MZ04 robot picks 2 pairs of screws using a vacuum gripper. The EOAT tooling has a max capacity of 4 screws.
Slide Table
The slide table transfers freshly moulded covers from the Hand over station to the ‘work’ position. It allows for the loading of 4 covers at a time. Once the slide table is in the ‘work’ position it holds the covers in place whilst the handling robot loads a pair of screws into each cover. Once the screws have been inserted, the slide table returns to the ‘load/unload’ position where the operator will collect the 4 completed covers.
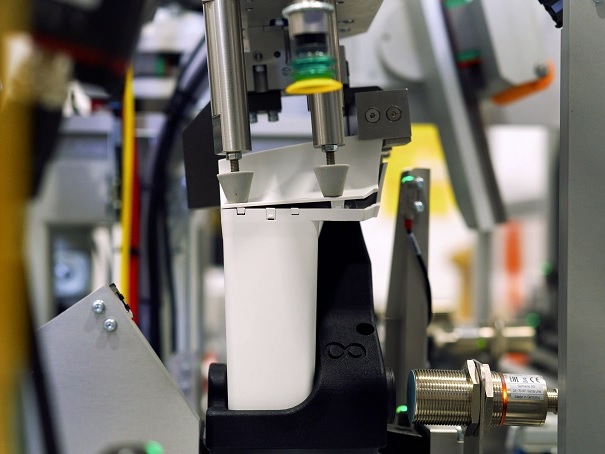
Hand Over Station
The operator places 4 freshly moulded covers into the vacuum nests so that they can be placed open face lowermost. There are 4 nests in the hand over station that squares up covers before placing them flat on the slide table below, only after the 4 completed covers from the previous cycle have been removed and the area below is clear.
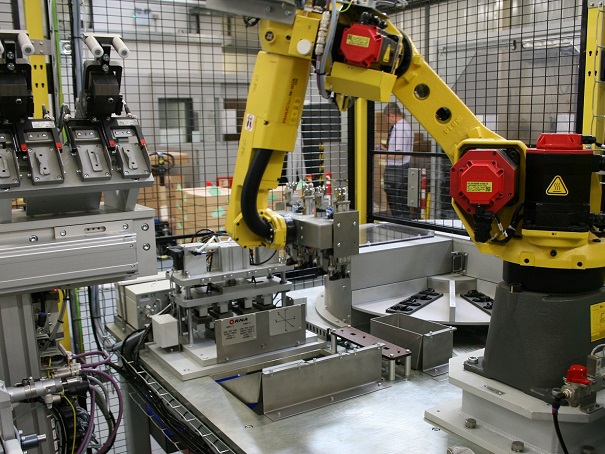
Handling Robot
The handling robot picks 2 pairs of screws (4 total) and then inserts them into 2 of the freshly moulded covers. Once it has used its 4 screws then it will return to the escapement to collect another 4 before inserting these.