

Industry:
Product:
Automotive Clip
RNA skills:-
● Machine building and integration
● Machine and process control
● Bowl feeding
● Robotic handling
● Project management
Solution
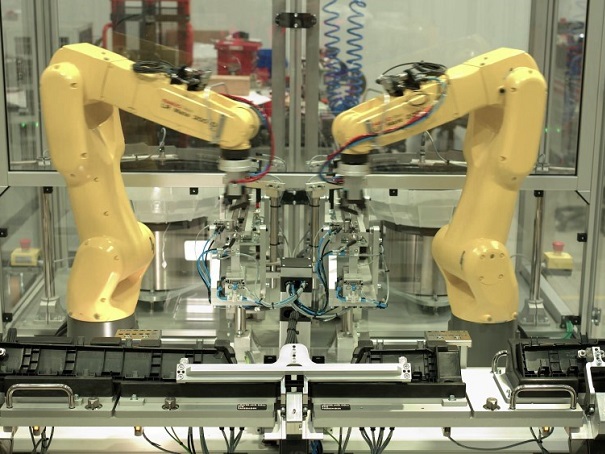
The customer had a requirement for semi-automatic Robot clipping machine to assist the operator in the assembly of the armrest finisher assemblies.
The automation is designed to accommodate the wrapped car sets (1 each of front armrest finisher left, front armrest finisher right, rear armrest finisher left and rear armrest finisher right). The machine automatically sorts and feeds clips from vibratory bowl feeders and assemble onto car armrests and also checks the correct colour armrest is being processed.
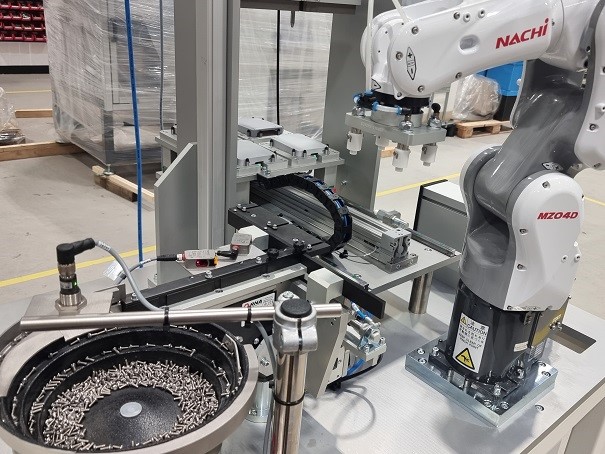
Clip Feeder
Tooled clip bowl feeder feeds and orientates clips. The clips are transferred in 1 stream along a vibratory linear feeder into a pneumatically operated escapement which separates and presents one part for collection by robot.
Pick & Place Robot
A Nachi MZ07 robot fitted with pneumatic gripper picks and accurately assembles clips onto the armrests. Integrated part present sensor checks clip has been assembled fully in position.
Nest
The nests/fixtures are used to locate and hold the armrests in position with ‘A’ surface down. Operator places wrapped parts into nest. Pneumatic swing clamp clamps the armrest into the fixture. Poka-Yoke colour detection checks variants at this time. Once clips are fitted by robot, clamps release. The nests are designed to accommodate all variants of each armrest finisher as and when required.
Poka-Yoke System
The poka-yoke systems are designed to the automation to ensure no faulty products pass through the assembly process. The poka-yoke devices are implemented to check the presence, orientation, and colour of the armrests. And also, the presence, orientation and functionality of clips are verified by integrating these automated checks.
 Clip Feeder
Clip Feeder
 6 Axis Robot picks and places clips
6 Axis Robot picks and places clips
Nest and fixture
Watch
How RNA clipping machine sorts and feeds clips from vibratory bowl feeders and assembles onto car armrests

Contact
Send your message to a member of our team
Read our Privacy Policy to learn how we manage and protect your submitted information.