
Included in FlexType™ Pack
Automated bagging in 5 steps
Key benefits
Features
Video
Enquiry form
FlexType™ P Pack
A STANDARD FLEXIBLE PACKING SOLUTION
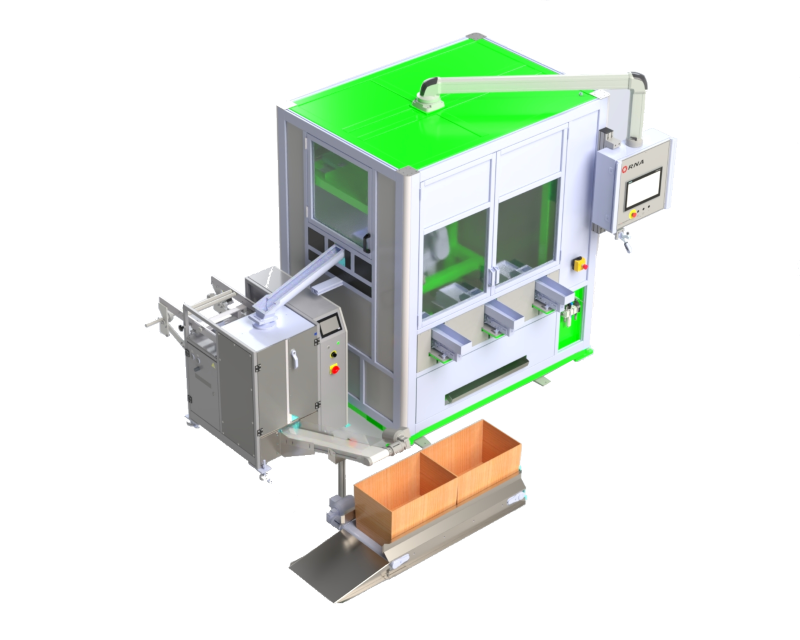
RNA’s FlexType™ P Pack presents a flexible automatic packing solution that utilises intelligent vibration platforms, coupled with industrial machine vision recognition and a 6-axis robot to feed and pack component parts of various shapes and sizes.

Downloads
FlexType™ P Pack
An intelligent, standardised robotic cell designed for high-speed bagging, combining vision-guided precision with modular flexibility for diverse component packing requirements.- Flexible feeding
- High reusability
- Vision guided
- Rapid changeover
- Standardised platform
 The FlexType™ P Pack is best used in applications where conventional bulk feeding systems find limitations such as fragile or complex parts, multiple variants requiring fast changeover, and evolving component design. Guiding robot with machine vision provides high speed and high precision handling and packing solutions.
The FlexType™ P Pack is best used in applications where conventional bulk feeding systems find limitations such as fragile or complex parts, multiple variants requiring fast changeover, and evolving component design. Guiding robot with machine vision provides high speed and high precision handling and packing solutions.
Included in FlexType™ P Pack Flexible Packing Machine
1. RNA Bulk Hopper
1/5
RNA Bulk Hopper
Standard off the shelf or custom bulk storage solutions; Various hopper size
Contact us
2. Flexible Feeder
3. Vision System
4. 6-Axis Robot with Custom Gripper
5. Bagging Machine
2/5
Flexible Feeder
FlexCube™ 50/80/250/380/530
FlexiBowl® 200/350/500/650/800/1200
Other flexible feeders to suit your application
Contact us
FlexiBowl® 200/350/500/650/800/1200
Other flexible feeders to suit your application
Links:
4/5
6-Axis Robot with Custom Gripper
A suitable 6-axis robot depending on payload and reach for handling and manipulating the products
Contact us
Links:

5/5
Bagging Machine
The AUTOBAG® 500™ bagger is a high-speed, automatic filling and sealing machine designed for reliability, flexibility and optimising packaging throughput; Capable of cycling at rates over 100 bags per minute.
Contact us
Links:
6 STEPS
FlexType™ P Pack | RNA FLEXIBLE PACKING MACHINE
FLEXIBLE, RELIABLE AND STANDARD SOLUTION FOR THE AUTOMATED HANDLING AND PACKING IN 5 STEPS
STEP 1 Bulk Storage: Various parts to be bagged are loaded in bulk into hoppers. Parts drop by vibration from hoppers onto flexible feeder platforms on demand.
STEP 2 Part Orientation: The flexible feeder complete pre-programmed vibratory cycles to orientate and separate component parts, presenting them to an integrated vision system for robot pick.
STEP 3 Intelligent Inspection: The vision system inspects the component parts on the flexible feeder platforms and identifies which are laying in a position suitable for being picked. The coordinates are sent to the robot.
STEP 4 Robotic Pick & Place: A 6-Axis Robot, with suitable end of arm tooling picks all identified component parts and transfer them to the bagging machine.
STEP 5 Final Packaging: Component parts are loaded to the bagging machine via a chute. The bagging machine presents a single opened bag per cycle, before sealing and dropping the bagged parts into a rotating chute which diverts bags into the designated storage box.


6 STEPS
VERSATILE PACKAGING FOR DIVERSE COMPONENT PARTS
As a dedicated robotic packaging system for multiple part variants, the FlexType™ P Pack is optimised for “high-mix” environments where product designs frequently evolve. It is a highly effective automated packaging system for multiple product variants, allowing new parts to be brought into production in just two minutes via software-based parameter adjustments.
A Flexible Alternative to Traditional Feeding: It provides a modern alternative to vibratory bowl feeding for packing, especially for fragile or complex parts that require extremely gentle handling.
Rapid Implementation: This high-speed automated packing solution is a standalone package with integrated controls, ensuring quick installation and easy reconfiguration for different industrial tasks
Cost-Efficient Sustainability: The platform is over 95% reusable, meaning that when a product line changes, the investment in the flexible automatic packing machine for small parts remains protected with minimal need for new tooling.
By integrating vision-guided robotics with a standardised platform, the FlexType™ P Pack functions as a high-performance flexible robotic packing machine for small parts, maximising uptime and optimizing overall packaging throughput
.
Key Benefits
Flexible feeding
- Alternative for vibratory bowl feeders
- Experience seamless, software-based part changeovers in minutes
- Easily process a wide range of part sizes and shapes
- Handle multiple variants of a component part or parts with complex geometry
Flexibility for part changeover
- Interchangeable FlexCube™ platform for pre-orientation of the parts
- Teachable vision system
- Auto calibration of the vibration parameters
Easy handling of variants
- Variants are stored by the controller
- Only 2 minutes to bring a new variant into production
Short delivery time
- Fully standard
- Pre-designed
Flexible packing solution
- Can accommodate multiple variants
- Robotic part transfer
- Multiple bagging machine options
High reusability
- More than 95% reusable (less investment)
- Specific tooling reduced to the minimum
Fast implementation
- Standard platform
- Standalone Package with Integrated Controls
Easy configuration and installation
- Quick setup and reprogram to perform a different application
- Fast and easy configuration adjusting to changes and demands
Watch
FlexType™ P Pack Flexible Packing Machine, coupled with intelligent vibration platforms, industrial machine vision recognition and 6-axis robot

Also available in:
![]() English (United States)
English (United States)
HOPPER
FLEXIBLE FEEDER
- Compatible with all parts geometries
- Minimum change-over times
- Extremely gentle part handling
- Free movement of parts
- No transmission of vibrations to the rest of the line
- Systematic part orientation
- Easy configuration with the feeding software
HOPPER
HOPPER SYSTEM
- Compatibility: RNA BVL-P hopper systems have been developed to fit the various platform sizes and feeding tasks.
- Plug and play: our hopper systems come factory-tuned and are easily integrated in the complete concept thanks to the enclosed control system. The discharge height is adapted for part transfer to the downstream FlexCube system.
- Demand-based feeding: BVL-P hopper systems are designed for optimized part transfer rates to the sorting platform, which are key to achieving short sorting cycle times.
- Enhanced autonomy: the filling volume is easily adaptable to your needs through the addition of static or upstream hopper units. And of course, communication between these hopper systems can be handled by RNA controllers.
HOPPER
VISION | SMART CONTROL SYSTEM
- Easy to use
- Intuitive recipe creation and configuration
- Plug and play
- Highly competitive system costs
- Compatible with any PLC & industrial robot brand
ROBOT & NEST
6-AXIS ROBOT
- Fully integrated: Compatible with customer preferred 6-axis robot, with custom gripper system to suit the application – quick change if required.
- Quick change: Reduce downtime with seamless changeover of both the robot gripper system and assembly fixture nest.
- Customised: Application specific gripper system and pick and place packaging.
ROBOT & NEST
PACKING MACHINE
Autobag® 500™
The Autobag 500 bagging machine is a high-speed, automatic filling and sealing machine designed for reliability, flexibility, and optimising packaging throughput. Capable of cycling at rates up to 100 bags per minute, this system was designed to maximise machine uptime
while lowering total cost of ownership.
- Bag Size Options W 55-300 mm; L 70-550 mm supported
- Cycling Speed Capability Over 100 bags per minute

Learm More >>
FlexType™ P Pack is also compatible with customer preferred bagger, with customising options to suit the application.
Contact
Send your message to a member of our team
Read our Privacy Policy to learn how we manage and protect your submitted information.