
Included in FlexType™ P
Automated assembly in 6 steps
Key benefits
Features
Video
Enquiry form
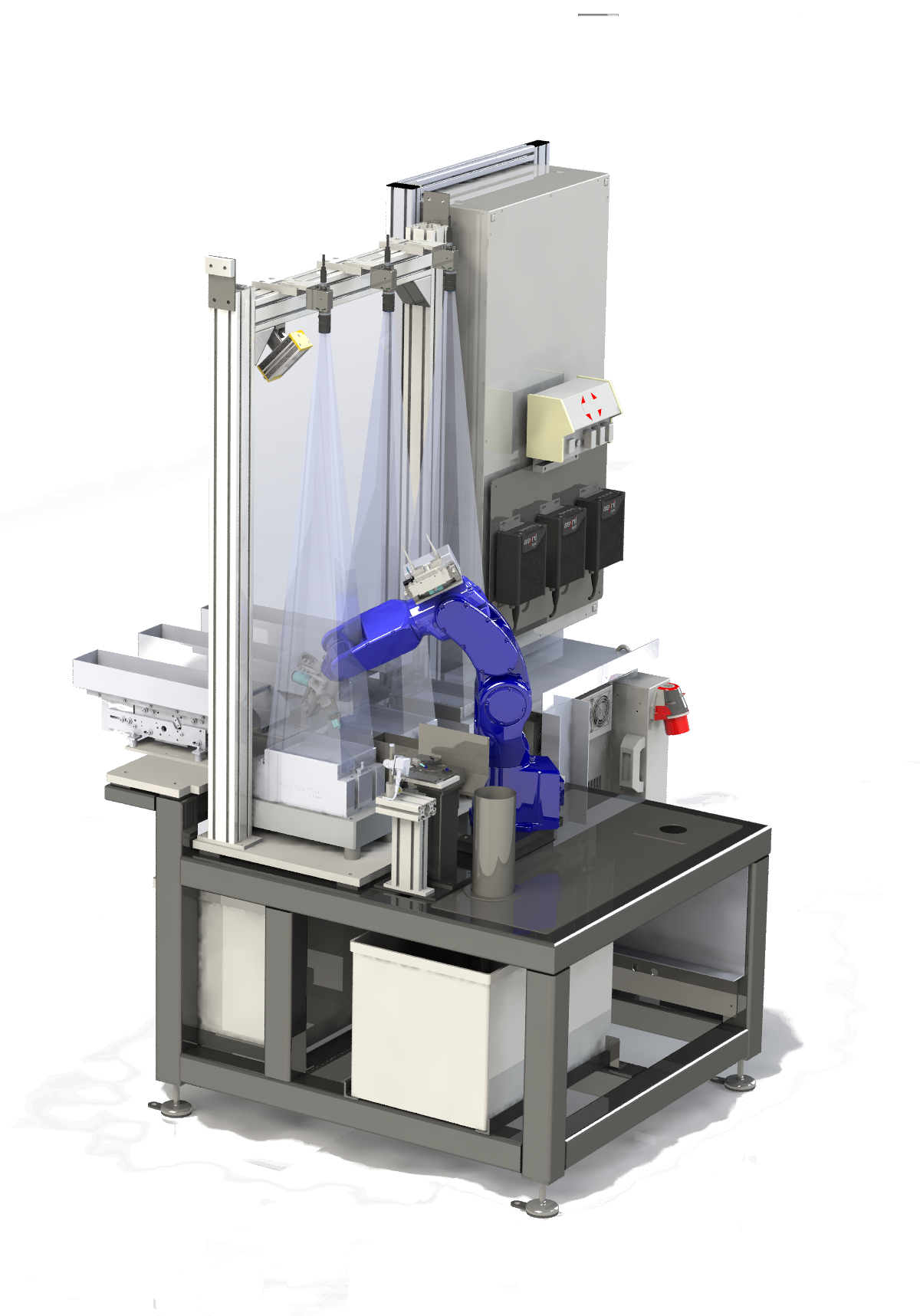
FlexType™ P Assembly
A STANDARD FLEXIBLE ASSEMBLY SOLUTION
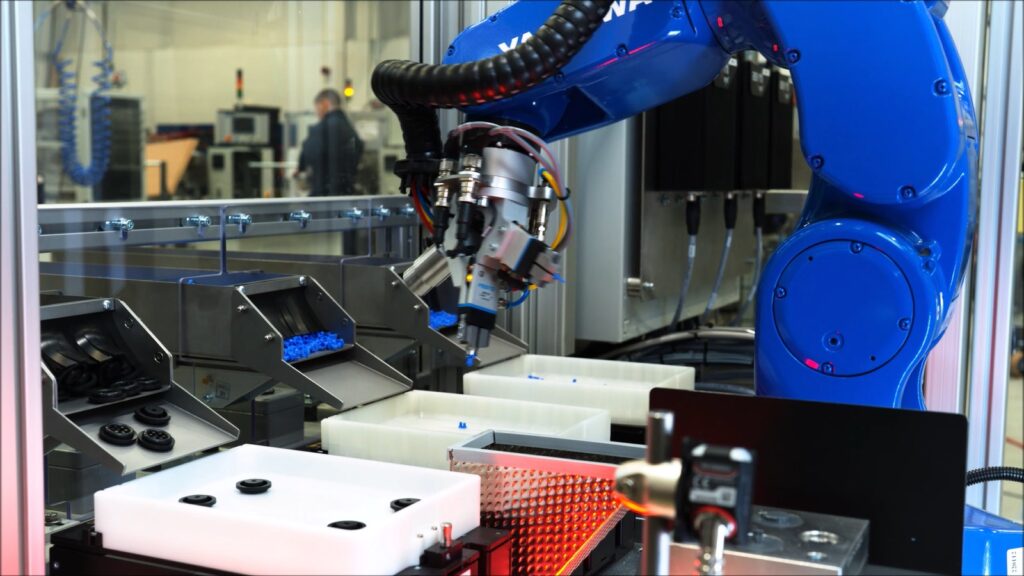
RNA’s FlexType™ P Assembly offers a flexible assembly solution that utilizes intelligent vibration platforms combined with industrial machine vision recognition and a 6-axis robot to feed and assemble component parts of various shapes and sizes.

Downloads
FlexType™ P Assembly
- Parts from 0.1mm to 150mm- Standardised platform
- Rapid reconfiguration
- Vision integration
- Future-proof technology
Included in FlexType™ P Assembly
1. RNA Bulk Hopper
1/5
RNA Bulk Hopper
Standard off the shelf or custom bulk storage solutions; Various hopper size
Contact us
2. FlexCube™
3. EYE+ vision system
4. 6-Axis Robot
5. Assembly Nest
1/5
RNA Bulk Hopper
Standard off the shelf or custom bulk storage solutions; Various hopper size
Contact us
Links:
2/5
FlexCube™
RNA FlexCube™ flexible vibration feeders offer high performance part feeding, pre-orientation and optimal surface distribution of bulk parts and components.
Contact us
Links:
3/5
EYE+ vision system
EYE+ smart control system | EYE+ optimizes the performance of your FlexCube™ flexible feeder with an integrated vision based on Artificial Intelligence and a powerful controller.
Contact us
Links:
4/5
6-Axis Robot
Automated robotic assembly; A suitable 6-axis robot depending on payload and reach for handling and manipulating the products
Contact us
6 STEPS
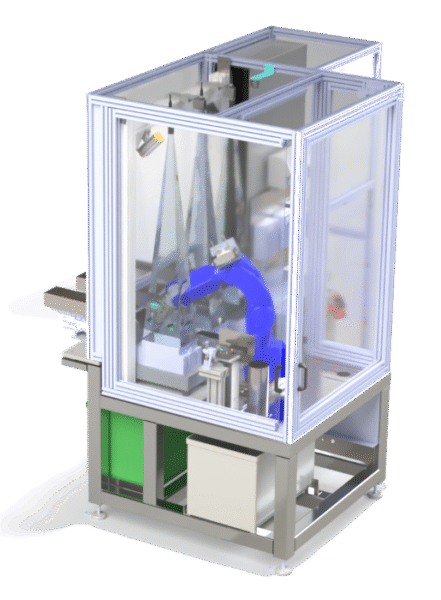
FlexType™ P Assembly | RNA FLEXIBLE ROBOTIC ASSEMBLY MACHINE
FLEXIBLE, RELIABLE AND STANDARD SOLUTION FOR THE AUTOMATED ROBOTIC ASSEMLBY IN 6 STEPS
STEP 1: Various parts to be assembled are loaded in bulk into hoppers. Parts are released by vibration from the hoppers onto FlexCube backlit vibratory platforms as needed.
STEP 2: The FlexCube complete pre-programmed vibratory cycles to orientate and separate component parts, presenting them to an integrated EYE+ vision system for robot pick.
STEP 3: The EYE+ vision system inspects the component parts on the FlexCube platforms and identifies which are laying in a position suitable for being picked. The coordinates are sent to the robot.
STEP 4: A 6-Axis Robot, with suitable end of arm tolling picks all identified component parts and places them in the proper orientation into the assembly nest.
STEP 5: The customizable nest is located by dowels for easy interchangeability and includes part-present sensing. An overhead-mounted vision system verifies the positioning of the component parts before final assembly.
STEP 6: The robot unloads the assembled component parts into a storage box via an unload chute.

Key Benefits
Flexible feeding
- An alternative to traditional vibratory bowl feeders
- Experience seamless, software-based part changeovers in minutes
- Easily process a wide range of part sizes and shapes
- Handle multiple variants or parts with complex geometries
Flexibility for part changeover
- Interchangeable FlexCube™ platform for part pre-orientation
- Teachable vision system with auto-calibration of vibration parameters
Easy variant handling
- Variants are stored by the controller
- Only 2 minutes needed to bring a new variant into production
Short delivery time
- Fully standard
- Pre-designed
High reusability
- Over 95% reusability, reducing investment
- Minimal specific tooling required
Fast implementation
- Standard platform design
- Standalone package with integrated controls
Easy configuration and installation
- Quick setup and reprogramming for new applications
- Rapid adjustment to changing production needs
Video
Watch
FlexType™ P Assembly Flexible Robotic Assembly Machine, coupled with intelligent vibration platforms, industrial machine vision recognition and 6-axis robot
Also available in:
![]() English
English
FLEXCUBE™
FLEXCUBE™ | INTELLIGENT 3-AXIS VIBRATION SYSTEM
RNA FlexCube™ flexible vibration feeders provide high-performance part feeding, pre-orientation, and optimal surface distribution of bulk parts and components.
RNA’s 3-axis vibration technology enables parts to move freely on the platform in multiple directions. Systematic part orientation is achieved using intelligently structured platforms. Through RNA’s intuitive HMI interface, vibration parameters can be fine-tuned for optimal part distribution and the fastest cycle times. A complete part feeding recipe can typically be created in under five minutes.
Specifications
FlexCube™ Features and Benefits
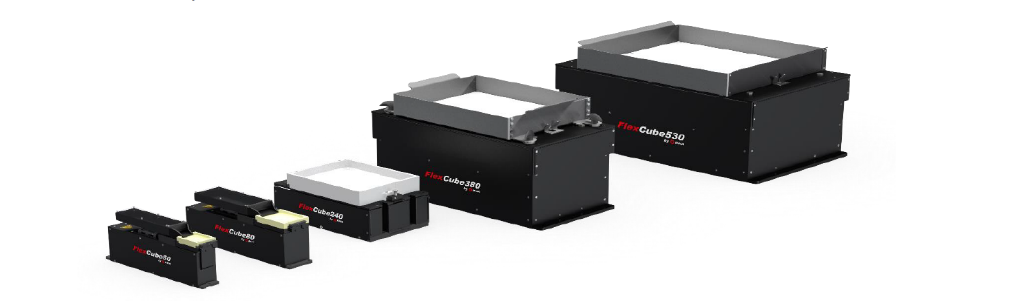
FlexCube 50 | FlexCube 80 | FlexCube 240 | FlexCube 380 | FlexCube 530 | |
 |  |  |  | | |
Typical part dimensions | <0.1 - 5 mm | 3 - 15 mm | 5 - 40 mm | 15 - 60 mm | 30 - 150 mm |
A | 14 | 15 | 39 | 252.8 ± 0.5 mm | 369.8 ± 0.5 mm |
B | 60 | 82 | 219.5 | 323.8 ± 0.5 mm | 426.8 ± 0.5 mm |
C | 8 | 9 | 26 | 10 mm | 10 mm |
D | 34 | 52 | 150 | 1.5x45° (4x) | 1.5x45° (4x) |
E | 45 | 65 | 195 | ||
F | 8 | 9 | 14.5 | ||
G | 46 | 65 | 171 | ||
Power supply | 24V / 4A | 24V / 6A | 24V / 8A | 24V / 20A | 24V / 20A |
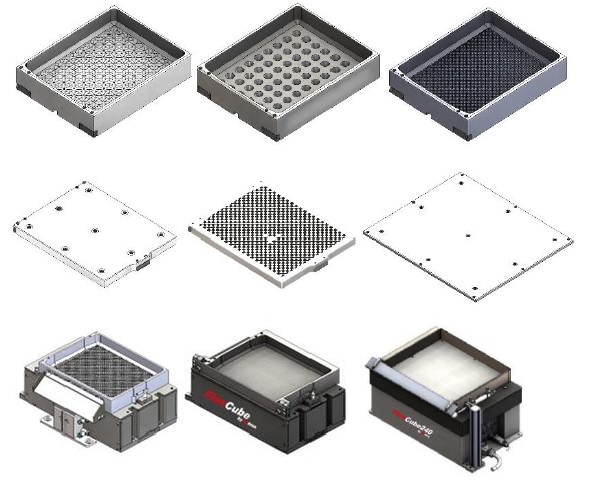
Platform | precision-manufactured platforms adapted to the parts geometry of parts and the task on hand | |
FlexCube | available with and without backlighting available backlighting: Red / white / green / blue / infrared | |
Communication | Ethernet (TCP/IP), Modbus TCP, EtherNet/IP, EtherCAT, PROFIBUS, SERCOS | |
Software | easy configuration and integration via enclosed operating software | |
Miscellaneous | - input for backlighting for synchronisation with vision system | |
- 2 digital inputs/outputs, e.g. for synchronisation of 2 hoppers | ||
- easy installation on machine table | ||
Options | - Platforms with part-specific surfaces | |
- Calibration plates for robot / vision system | ||
- Quick emptying devices | ||
- Ejection system for quick emptying |
Compatible with all parts geometries: 99% of all parts can be separated by this feeding system, including parts featuring complex outer geometries, and highly fragile parts.
Minimum change-over times: easy exchange of part-specific vibratory plates provides for flexible and future-proof production systems.
Extremely gentle part handling with patented 3-axis vibratory system: Parts can be moved in all directions and flipping parameters can be stored for each specific part.
Free movement of parts in all directions thanks to the use of magnetic coil actuators, for optimal acquisition by camera system with the objective of presenting the parts in the shortest possible time.
No transmission of vibrations to the rest of the line thanks to decoupling of vibratory platform from the casing.
Systematic part orientation using intelligent vibration cycles.
Easy configuration with the feeding software.
HOPPER
HOPPER SYSTEMS
- Compatibility: RNA BVL-P hopper systems are designed to fit various platform sizes and feeding tasks.
- Plug and play: Our hopper systems come factory-tuned and are easily integrated into the complete setup thanks to the enclosed control system. The discharge height is optimized for part transfer to the downstream FlexCube™ system.
- Demand-based feeding: BVL-P hopper systems ensure optimized part transfer rates to the sorting platform—crucial for achieving short sorting cycle times.
- Enhanced autonomy: The filling volume can be easily adjusted to your needs by adding static or upstream hopper units. Communication between these hopper systems is managed via RNA controllers.
EYE+
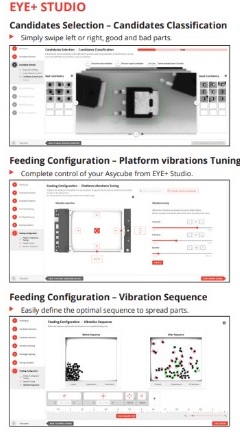
EYE+ | SMART CONTROL SYSTEM
- Easy to use: No prior machine vision experience is needed to set up and operate EYE+, resulting in faster installation and lower setup costs.
- Intuitive recipe creation and configuration: A user-friendly interface with step-by-step guidance makes configuration simple and quick. A complete, calibrated robot and vision system can be ready within minutes, and new recipes can be created in a fraction of the time compared to traditional systems.
- Plug and play: Designed for easy integration with any size FlexCube™ and any industrial robot, offering a hassle-free setup. Predefined vision parameters, help tips, and graphics allow for fast installation and calibration—even without prior experience.
- All included: Accessible directly through a web browser—no software download, additional licensing, or third-party components required.
- Attractive: Offers highly competitive system costs compared to conventional solutions.
- Compatible with any PLC & industrial robot brand: Using TCP/IP communication, EYE+ works with any robot brand, providing precise pick-point locations for all parts.
ROBOT & NEST
6-AXIS ROBOT & ASSEMBLY NEST
- Fully integrated: Compatible with the customer’s preferred 6-axis robot, featuring a custom gripper system tailored to the application — with quick-change capability if required.
- Quick change: Minimize downtime with seamless changeover of both the robot gripper system and assembly fixture nest.
- Customized: Application-specific gripper system and assembly fixture nest.
- Double checked: Fixture nest equipped with vision verification to ensure efficient assembly, with good/bad part unloading supplied as standard.
Contact
Send your message to a member of our team
Read our Privacy Policy to learn how we manage and protect your submitted information.