How to Choose – Options for Part Presentation in Robotic Assembly
Author: Mathew Hallifax
The cost to present parts to a robot for machine loading and assembly has often been underestimated. Part-presentation within a flexible automation system will usually depend upon a number of factors such as the manufacturing process, product design and the material handling system as a whole.
 It is crucial to consider how to present parts to the robot at the beginning of the design phase of the robot deployment. A common mistake is to start integrating the robot and then realize that part presentation is an issue, which induces extra costs and delays in the project.
It is crucial to consider how to present parts to the robot at the beginning of the design phase of the robot deployment. A common mistake is to start integrating the robot and then realize that part presentation is an issue, which induces extra costs and delays in the project.
By itself, a robotic arm is unable to detect the part that it is handling, where the part is located, or whether it has grasped the part in a correct orientation. Techniques such as precise placement of the part, force sensors, vision systems, and presence sensors allow a robot to ‘see’ and pick the parts reliably.
RNA has a wide range of part presentation solutions, which ensures that all parts, including those with irregular geometries can be presented in such a way, that the robot will always handle them correctly. Maximising cycle times and improving output and efficiency.
Here are some part presentation solutions to be used to present parts to a robot:
The commonly used part feeders for robotic assembly are specially-tooled vibratory bowl feeders, vibration feeders, mechanical feeders, and flexible feeding systems. Sometimes transporting to a nest, or an escapement.

Jigs and Fixtures are commonly used to locate a part in a precise position for the robot, which can be used by themselves or in combination with other part presentation solutions.

Tray handling is an effective way to precisely present parts to a robot. Each part is placed in a tray in exactly the same position per the specifications. Using trays makes it simple to program the robot’s motion when the parts and tray are always in the same position.

Parts can be agitated on special trays so that they are pickable with vision, or arranged in a matrix for simple picking by the robot. RNA are European distributors for such a system known as Asycube.

Boxes can be used to present parts directly to the robot if the parts are stacked in a precise order. Picking directly from the box saves handling time.

A robot to pick randomly oriented parts from a bin is one of the most challenging automation tasks, as complex 3D vision systems are often required.

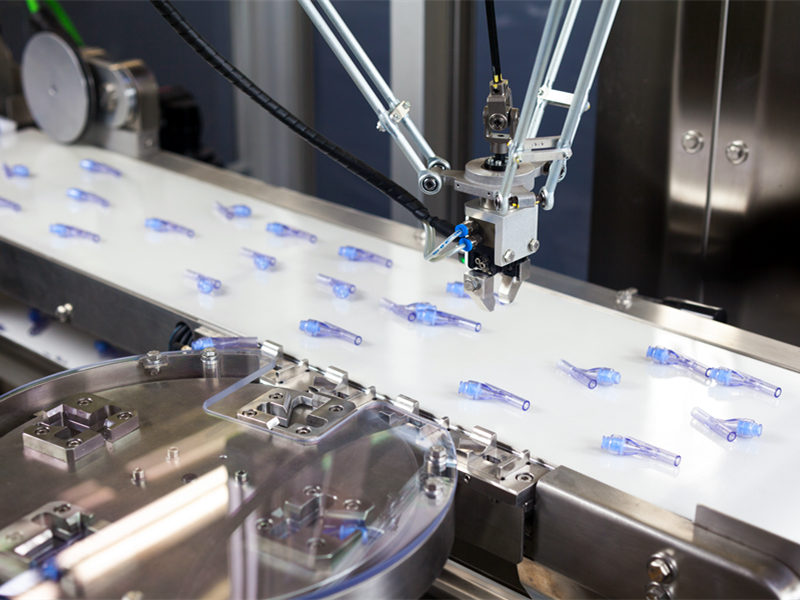
A vision guided robot can properly pick the parts whether parts are carried by a conveyor, on a tray or pallet, or simply by hand. The parts don’t need to be positioned as precisely for the robot.
>> See a case study video
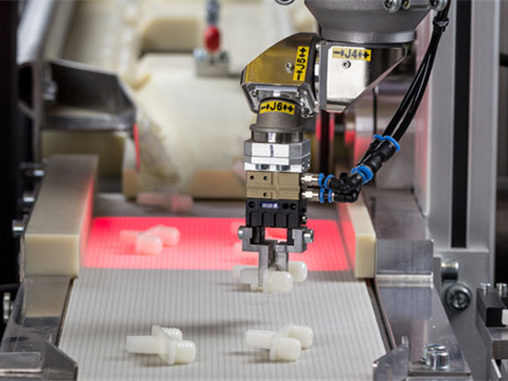
Conveyors are one of the most commonly used part presentation solutions due to their low-profile design, working in combination with an appropriate vision system.
How to choose? There are most likely more than one viable solutions for your automation product. Talk to one of our experts to guide you through the options to help select the best option for your application.